Extensions to Broaden the Scope of Supported Models
Case study: A Teleoperated Robot is a device such as a robotic vehicle, surgical arm, unmanned aerial vehicle (UAV), etc. that is remotely controlled by a human. This case study was based on an actual robot that is still in operation.
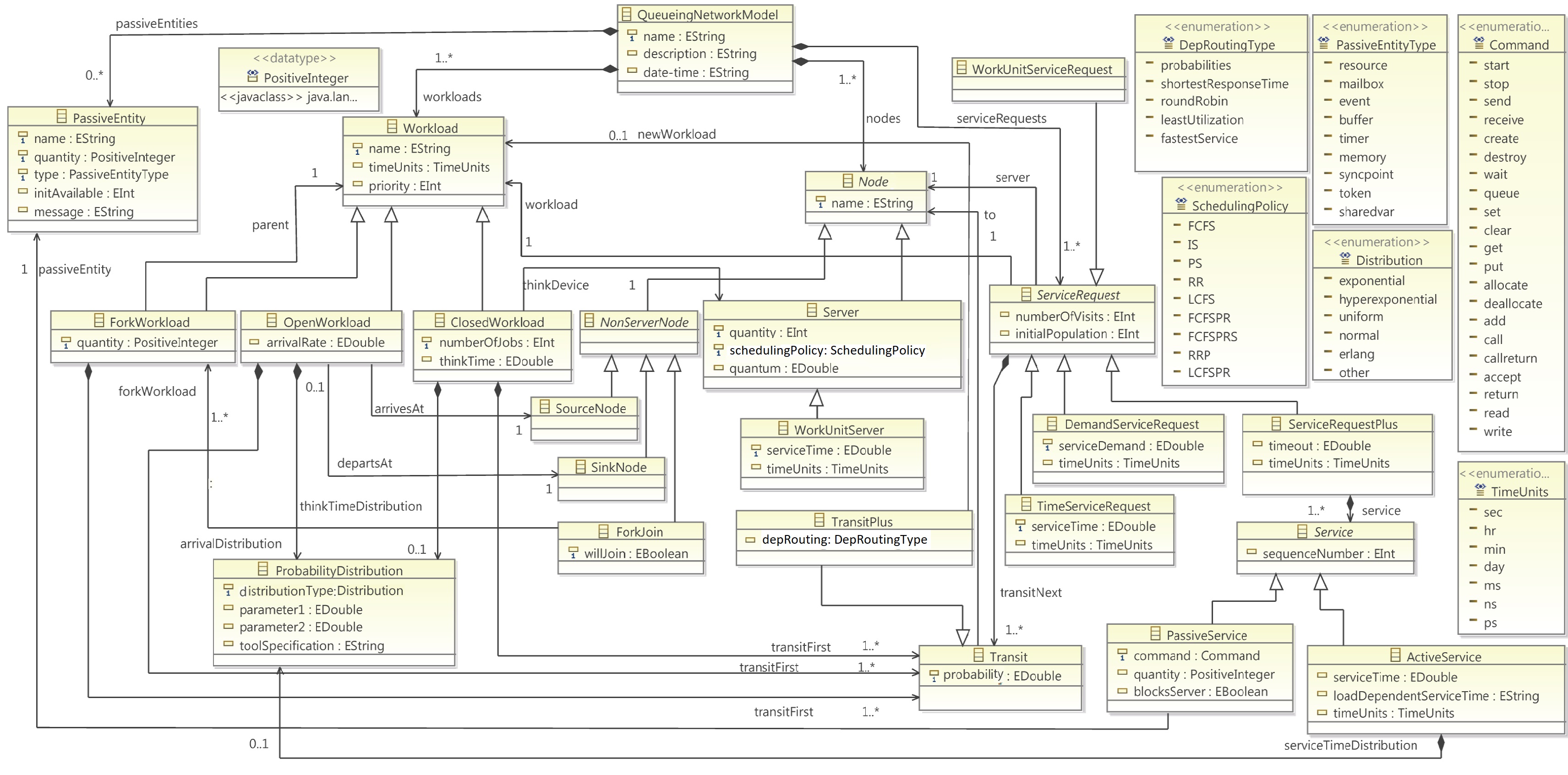
Teleoperated Robot (pmif+ specification)
(the corresponding Spmif+ specification is at http://mifs.uib.cat/spmifplus/)
Case study: A Buffer with a pipe and filter architectural style. Data arrives from an external source at a constant arrival rate of 1 unit per second, it is processed by the first (open) workload, GetIm, then put in a buffer. The second (closed) workload, Spatial, after a thinkTime of 0, begins with a get from that buffer, when the data arrives Spatial processes it, then puts it to another buffer, and the cycle repeats. Three other “downstream” closed workloads, Temporal, Threshold, Paths, do the same. Each workload executes on its own processor so the workloads can execute in parallel. Workloads may have to wait on a get for data to arrive in the buffer, or at a a put if there is not space in the buffer because a downstream process has not yet processed earlier data.
Examples (mentioned in the paper)
- ForkJoinV1.xmi
- ForkJoinV2.xmi
- Buffer.xmi
Examples (zip file with all three above)
Test models of all the other features
- CallReturn.xmi
- ClearSet.xmi
- SendReceive.xmi
- Mailbox.xmi
- DepRouting.xmi
- Memory1.xmi
- Token1.xmi
- TransitPlus1.xmi
Test models (zip file with all 8 above)
Tools
Pmif+ to Qnap2 transformation tool: PmifPlusToQnap
All the above examples can be transformed to Qnap2 using the above transformation tool.
For more related tools go to Tools.